不動テトラ×ICT
様々なICTを取り入れ、建設生産システムにおける効率化・高度化による生産性向上を進めています。
土木事業のCIM・ICT取り組み事例紹介
近年、国交省は3次元モデルを活用して調査・計画、設計、施工、維持管理の各段階を一元管理するCIM(Construction Information Modeling)を工事に導入し、試行を重ね基準類を整備しています。CIMの普及は急速であり、国交省は2023年度までに直轄工事に対しCIMを原則適用することを表明しています。当社においては「平成27年度東海環状口ヶ島南高架橋橋台工事(中部地方整備局)」において初の施工者希望型CIM試行工事に取り組み、その後もCIMに関する試行に取り組んで参りました。本ページでは土木事業部におけるCIMの取り組みを紹介します。
CIM対応工事施工実績
平成27年度 東海環状口ヶ島南高架橋 橋台工事 [試行工事]
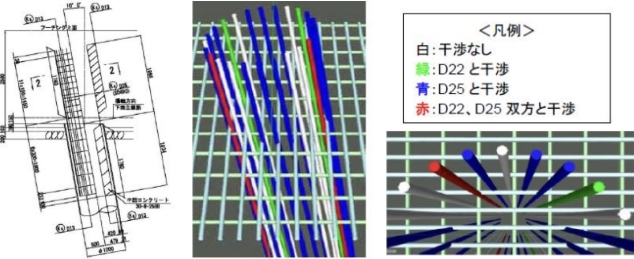
3次元橋台モデルの作成
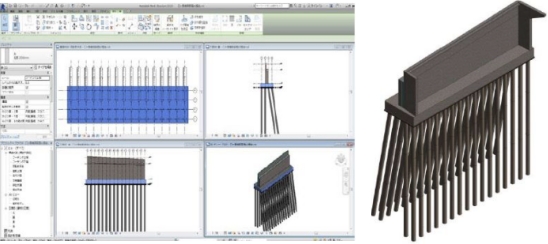
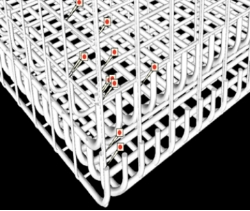
3D配筋による杭頭鉄筋干渉チェック
日建連施工CIM事例集
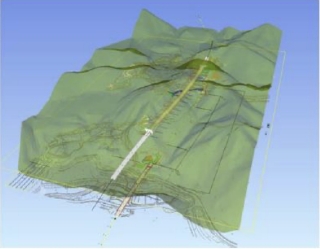
多伎朝山道路 口田儀第1トンネル工事 [試行工事]
口田儀第1号トンネルの3次元モデル
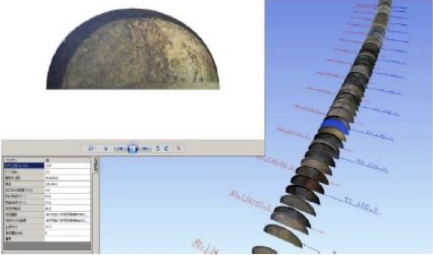
出来形(ロックボルト)

トンネル切羽観察記録/切羽画像
日建連施工CIM事例集
相馬港本港地区 防波堤(沖)(災害復旧)上部及び消波工事
3次元測量を行い
正確な現況地形データを作成
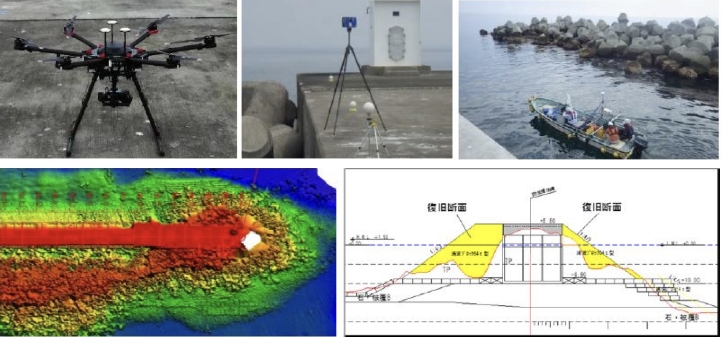
現況地形データを基に
据付検討用模型を作成
消波ブロック据付状況

日建連施工CIM事例集
細島港(外港地区)防波堤(南沖)ケーソン製作工事
3次元ケーソンモデルの作成
3D配筋による鉄筋干渉チェック
令和元年度鹿児島港(鴨池中央港区) 臨港道路橋脚P8下部工工事 [CIM活用工事]
4Dシュミュレーションによる作業確認
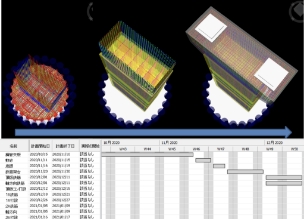
高密度配筋の組立手順の確認
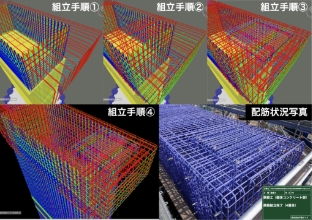
鉄筋の干渉チェック
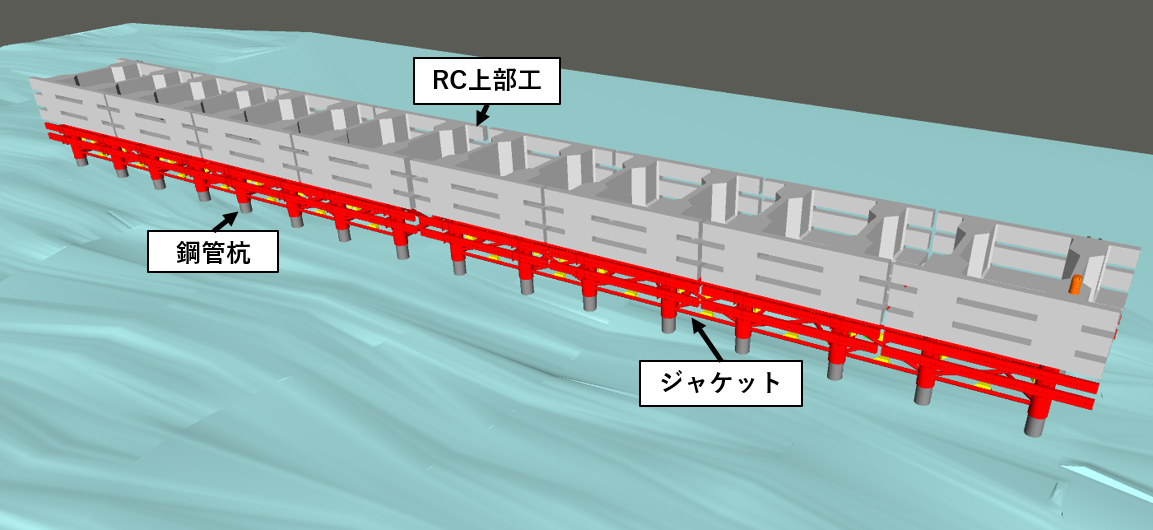
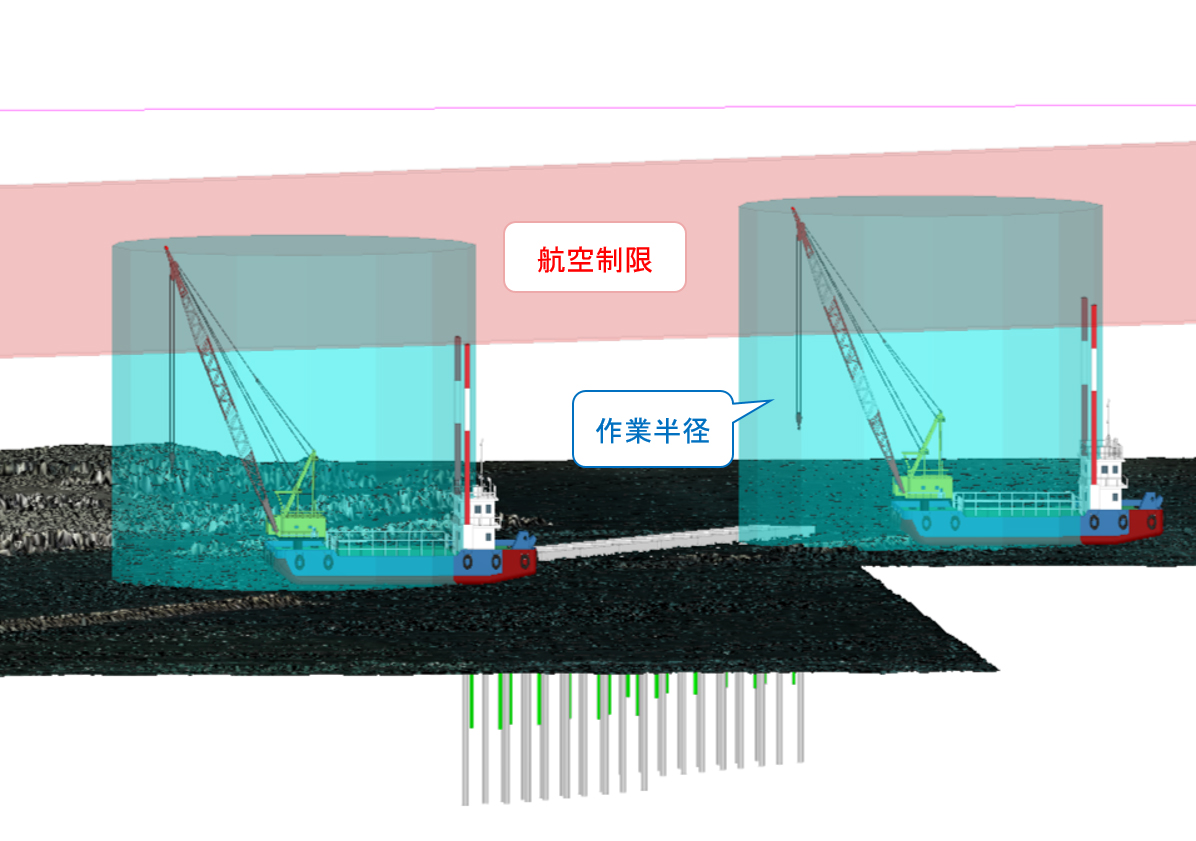
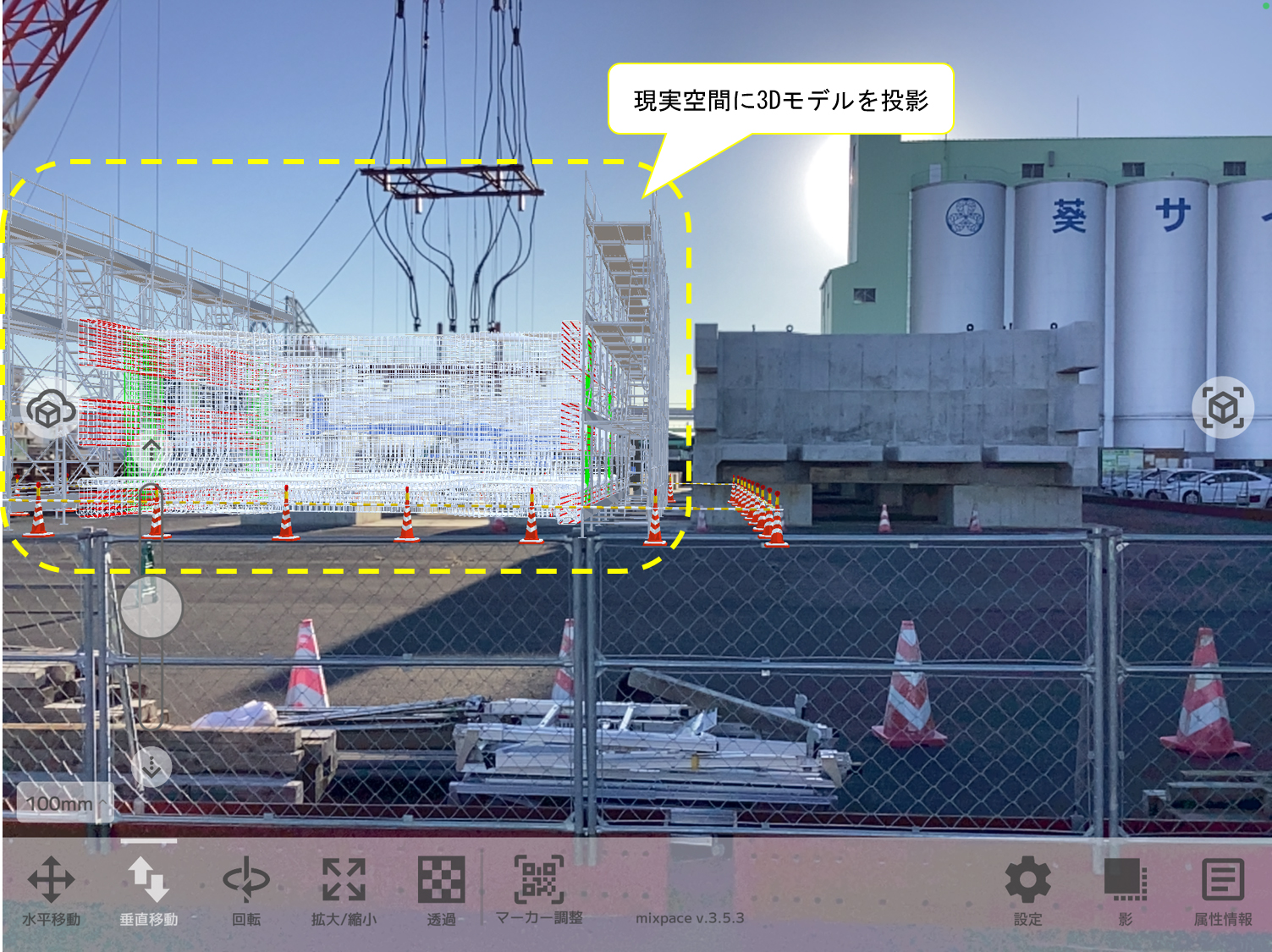
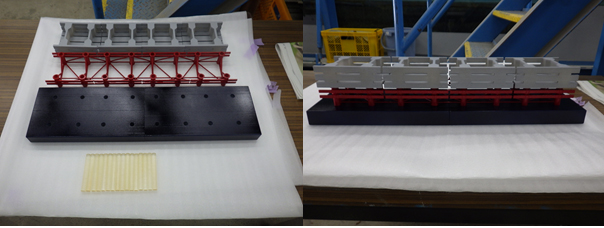
駿河海岸一色離岸堤災害復旧工事
CIM統合モデル
航空制限確認モデル
ARを使用した作業ヤードの確認
CIMモデルと3Dプリンターを使用した模型の作成
R3荒川中堤西小松川町地区護岸工事
モデル全景
周辺構造物・支障物と干渉確認
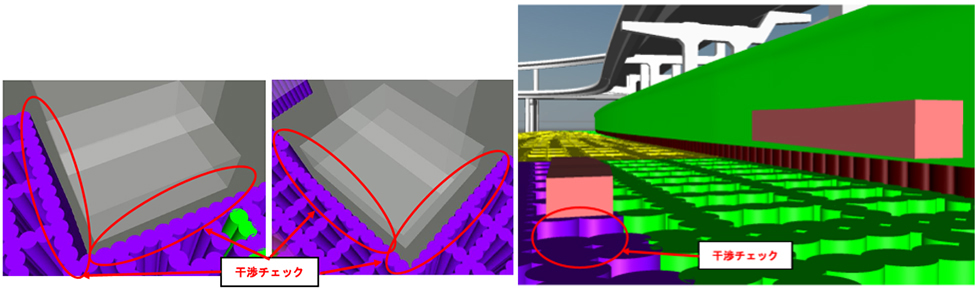
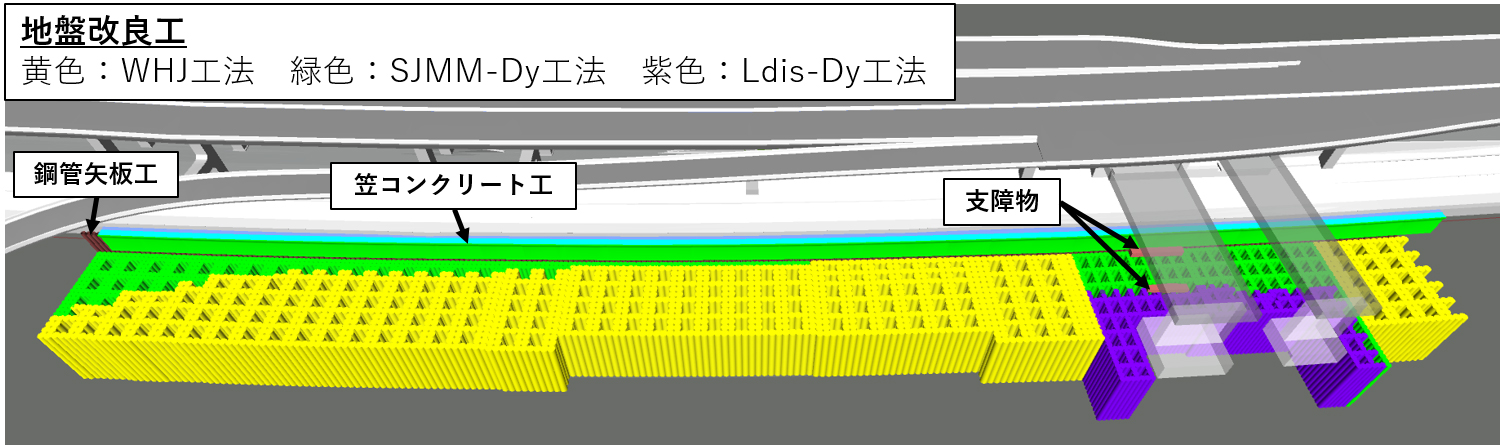
令和5年度細島港(工業港地区)岸壁(-9m)地盤改良工事
竣工イメージ図

モデル全景 透過ver
ARを使用した施工箇所確認
施工中の事例
鉄道高架橋工事
モデル全景

スマートIC工事
モデル全景

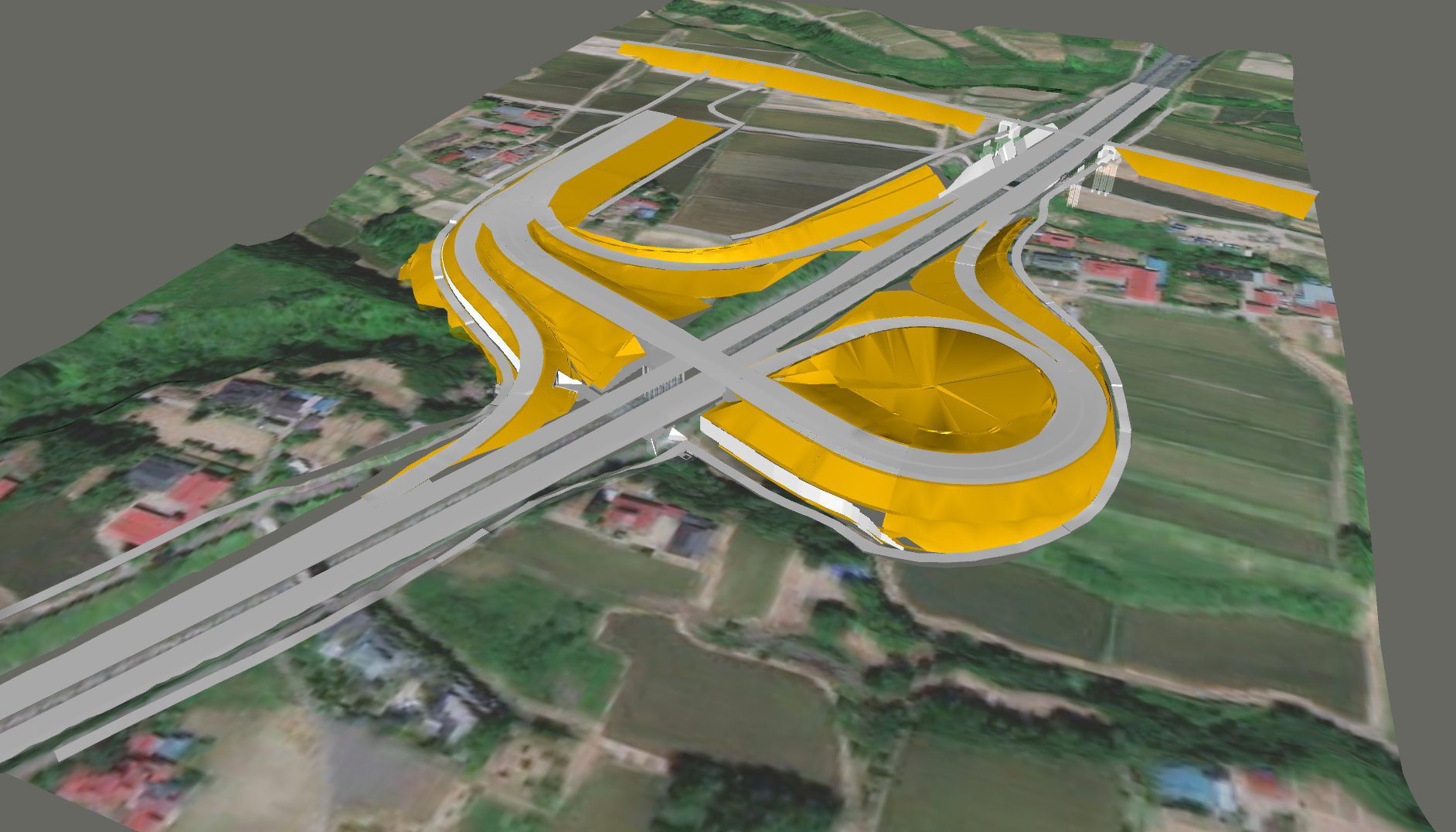
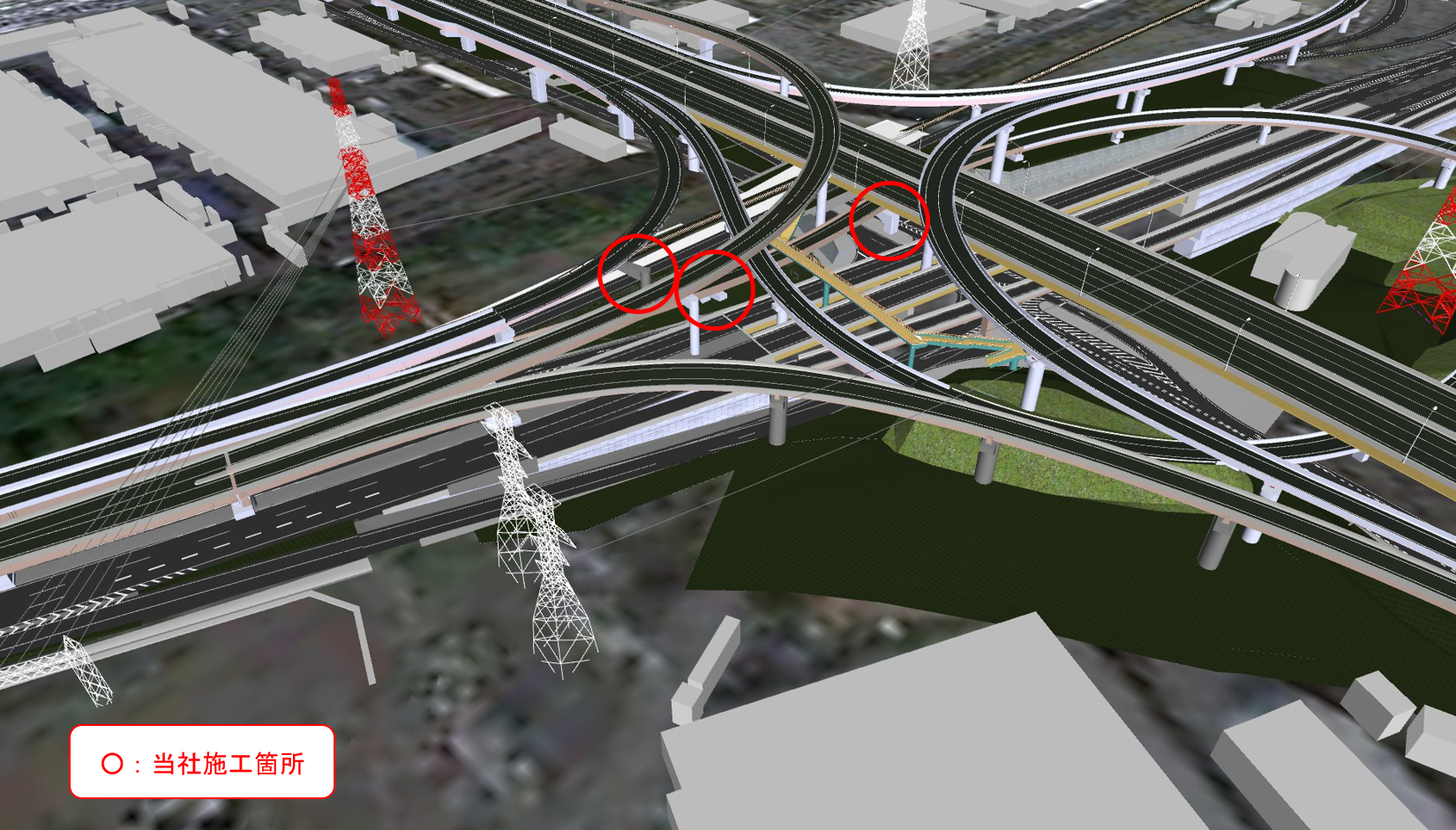
インターチェンジ工事
モデル全景
橋梁撤去モデル
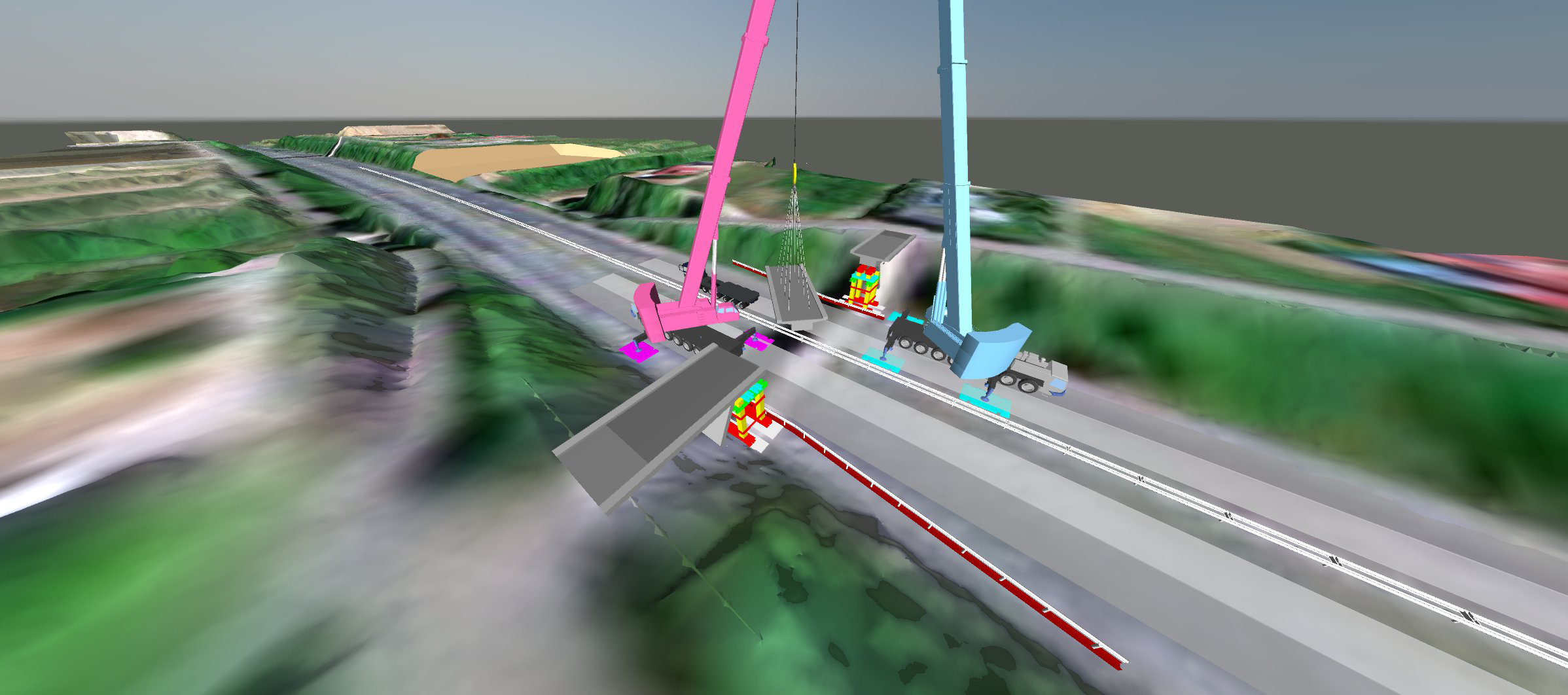
施工ステップ動画
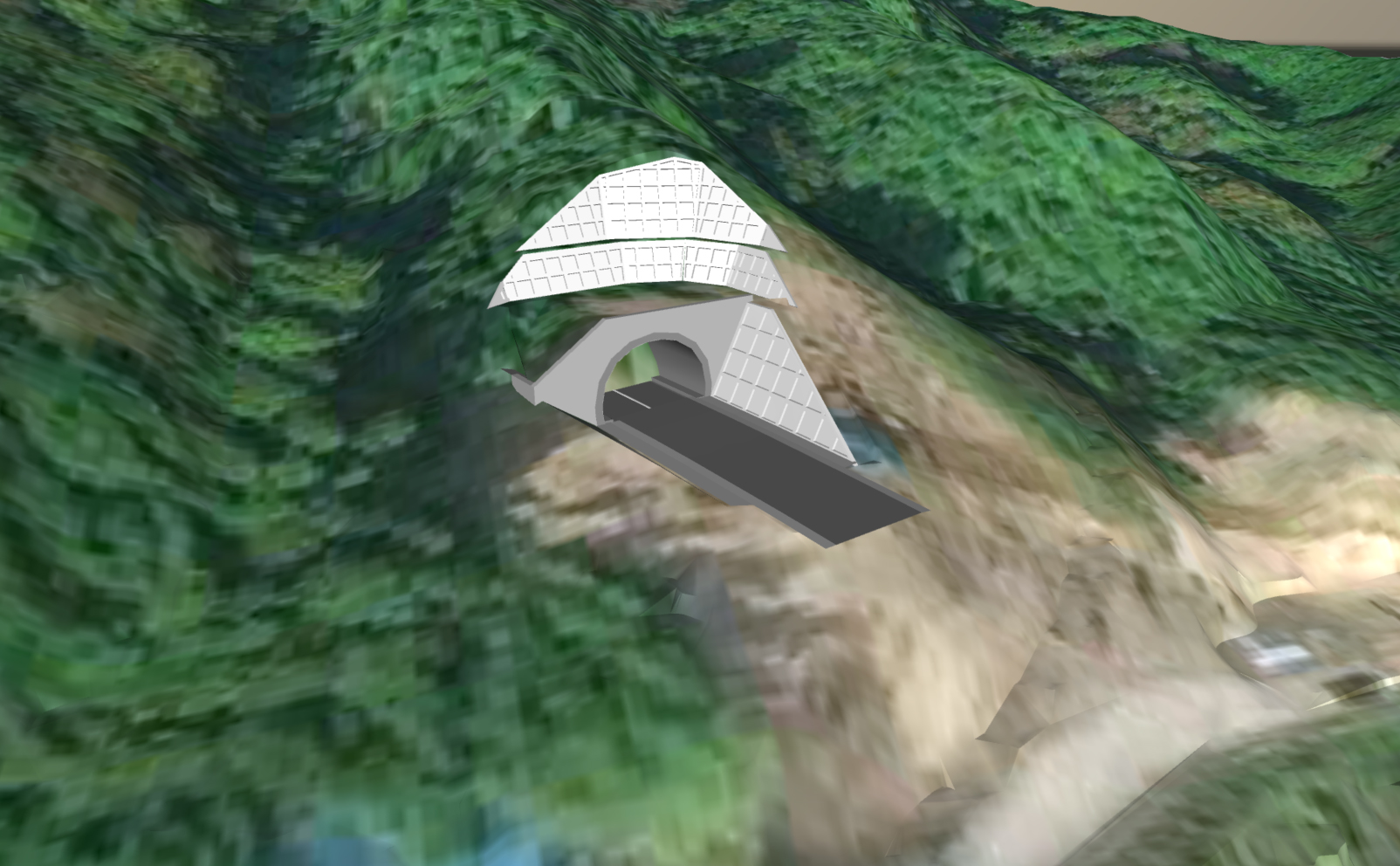
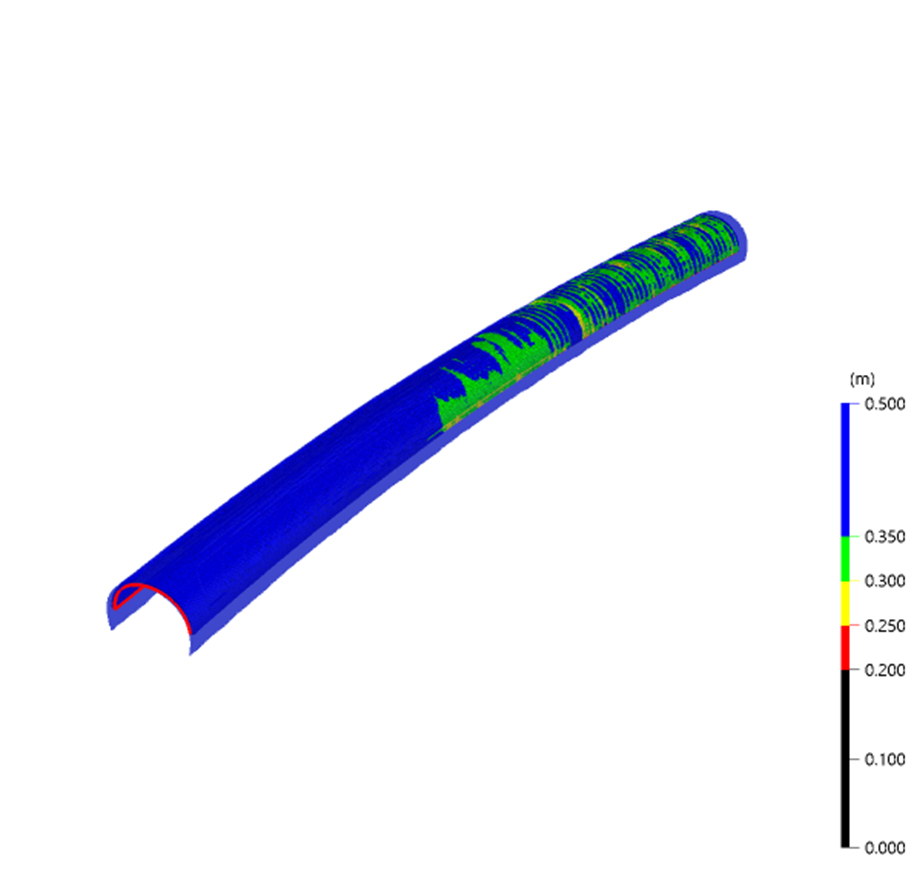
トンネル工事
終点坑口の検討
出来形の面的評価
地下駐輪場整備工事
モデル全景
駐輪設備モデル近景
道路高架橋下部工事
モデル全景
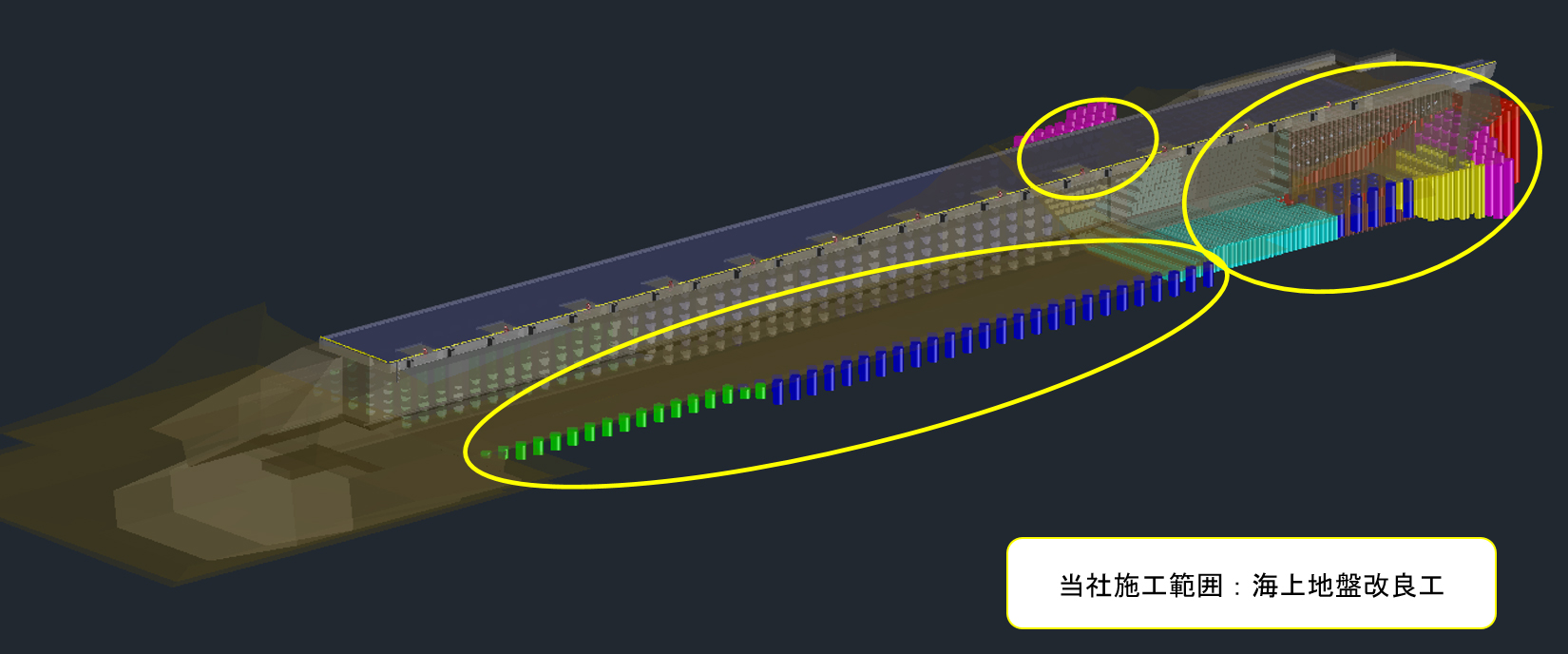
埋立護岸基礎工事
モデル全景
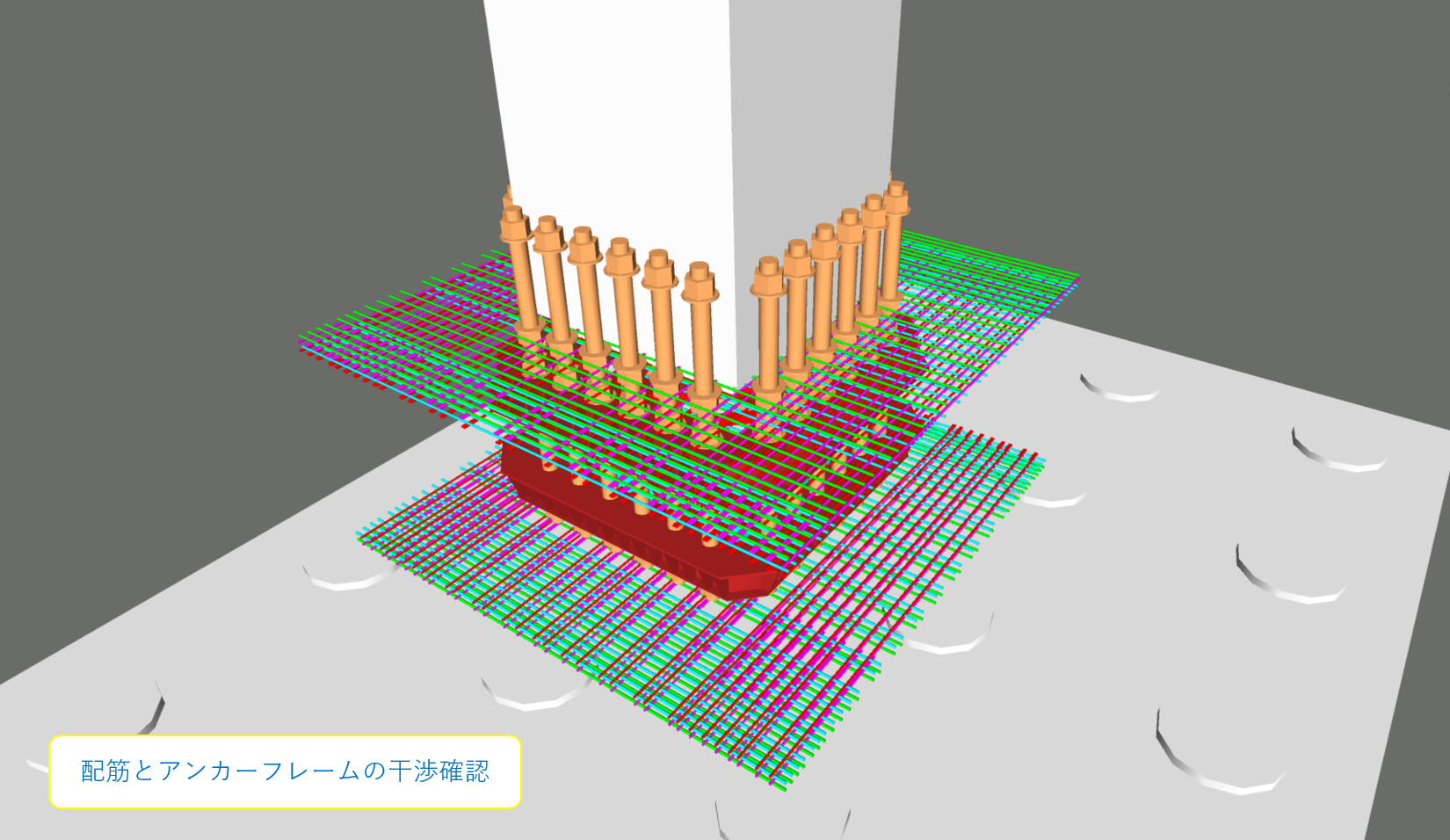
道路橋基礎工事
モデル全景
橋脚配筋モデル
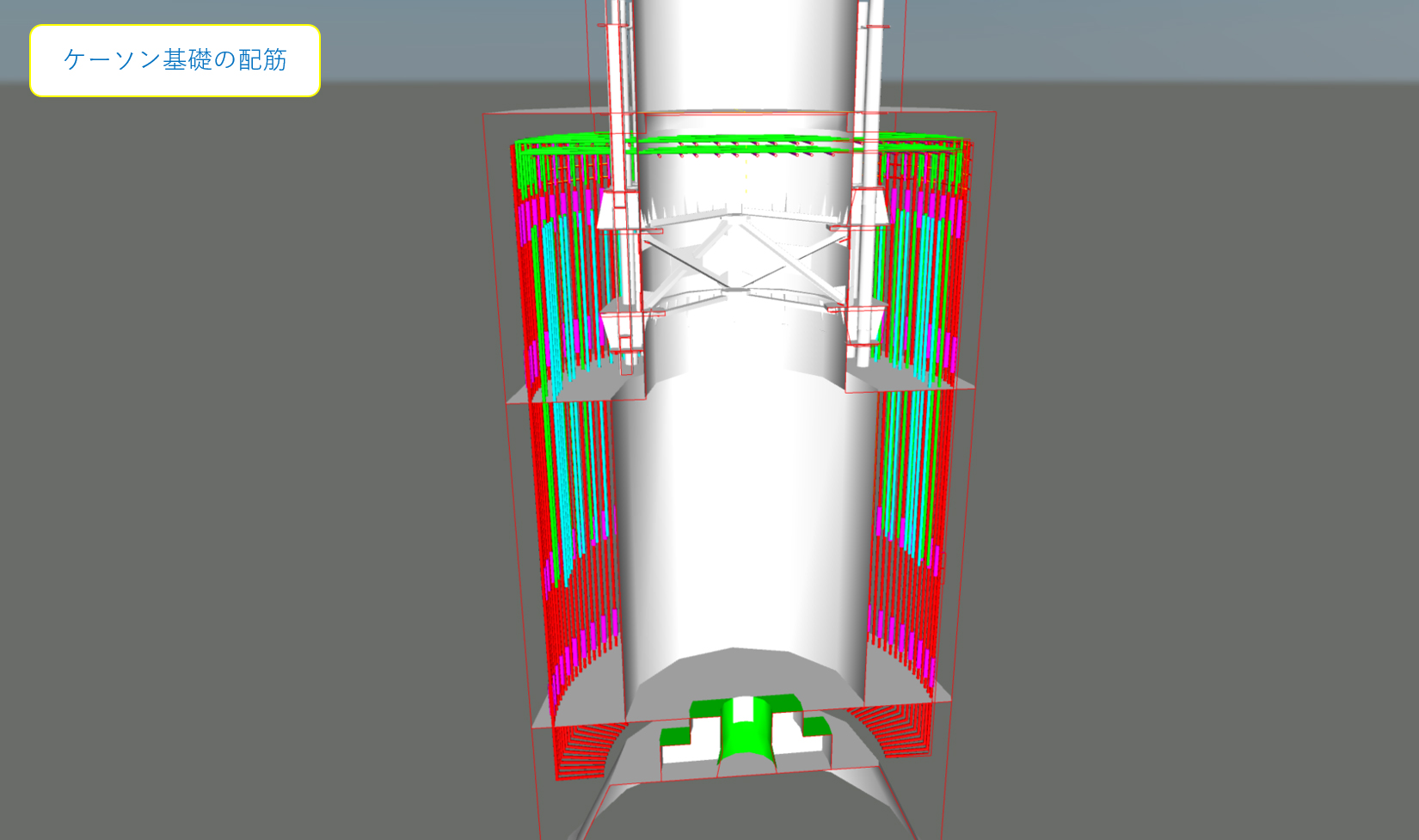
橋脚配筋モデル②
CIM試行案件の内容
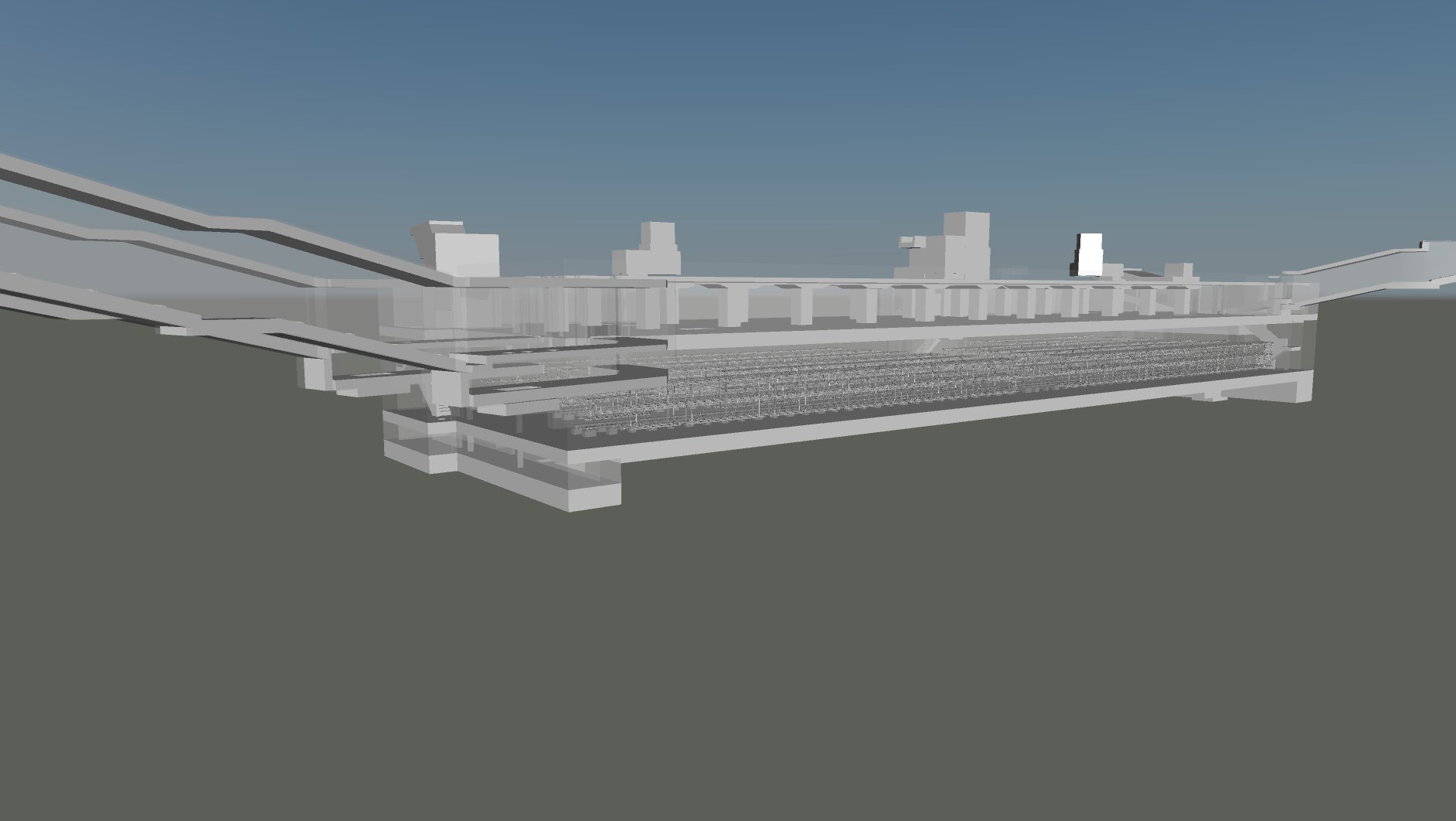
点群データを活用した構造物の施工管理に対する試行
当社施工の現場にて今後普及する構造物工に対するICTの活用に対応すべく、構造物の施工管理における点群データの活用を目的に試行を実施しました。
実施項目・方法
-
1. 3D測量・点群データ処理
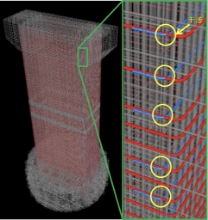
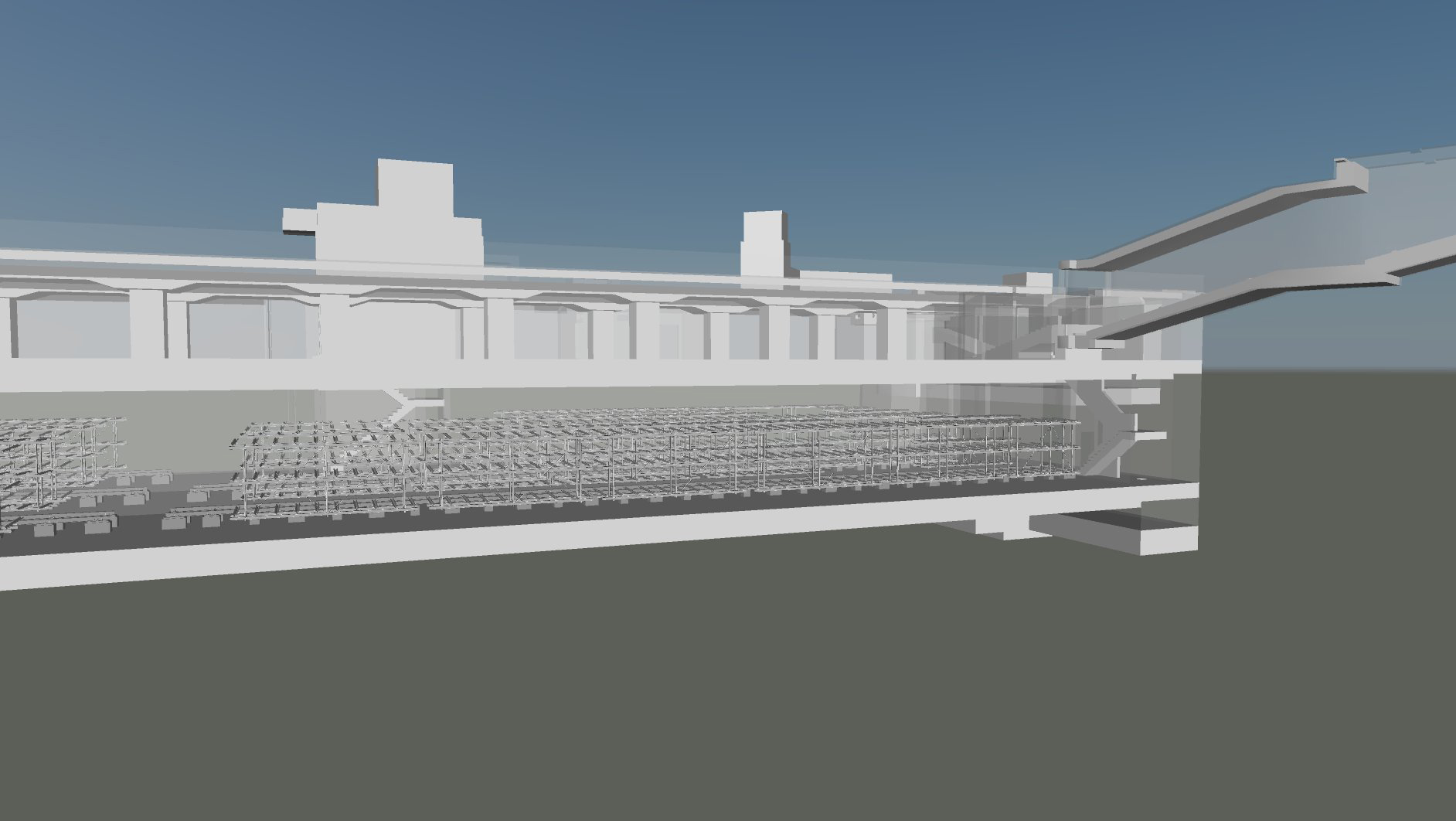
3Dレーザースキャナを使用し、施工済みの単独橋脚および中央自動車道の既設橋脚を対象に3D測量を実施し、点群データを取得しました。
取得した点群データを編集し、対象構造物を抽出したデータを作成しました。全景
図-1 3D測量による点群データ 対象構造物の抽

-
2. 単独橋脚の出来形管理
単独橋脚を対象に、点群データを活用した出来形管理を実施しました。出来形管理は抽出した橋脚の点群データに対し、管理位置における基準高および躯体寸法を計測する手法を採用しました。
また、橋脚の面管理を目的として躯体表面の平坦性をヒートマップにて評価しました。点群データによる3Dモデル

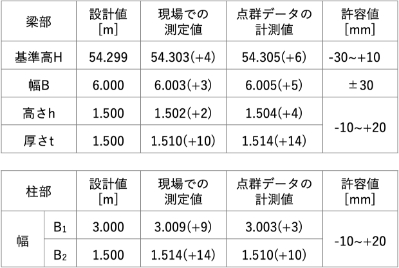
表中の括弧内は設計値との差[mm]を示す。 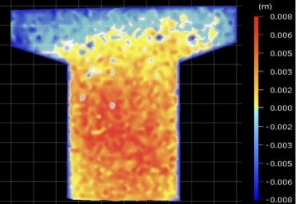
-
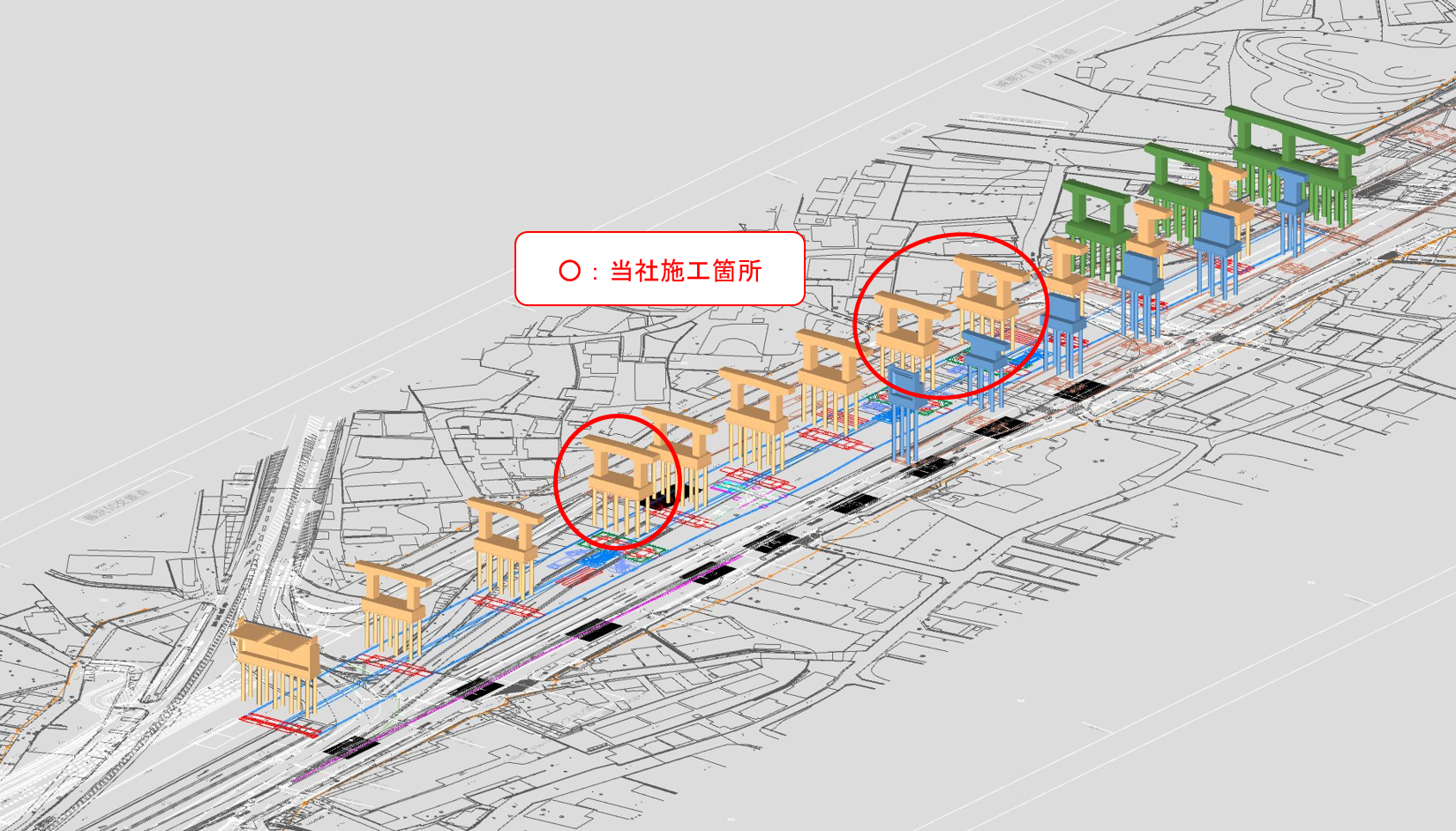
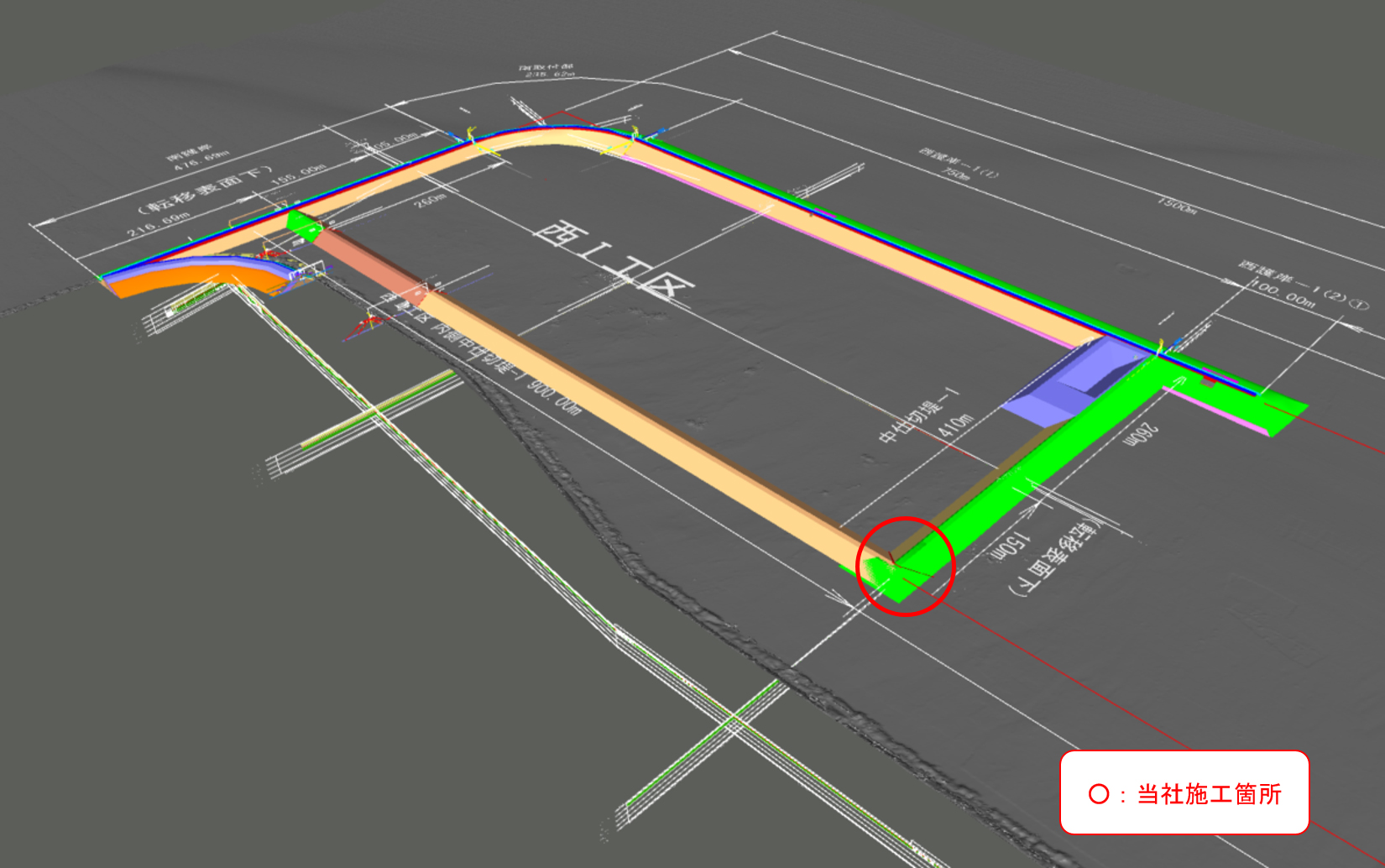
3. 拡幅橋脚における既設橋脚の位置確認
橋脚拡幅部では既設橋脚に新設橋脚のフーチングおよび梁部を接続させるため、既設橋脚の位置を事前に確認する必要があります。
そこで、点群データを活用し既設橋脚の位置を面的に捉え、現場での測定値と比較しました。梁側部断面

点群データを活用したICT土工に関する試行
当社施工の現場にて現在普及している土工に対するICTの活用に対応すべく、土工の施工管理における点群データの活用を目的に試行を実施しました。
-
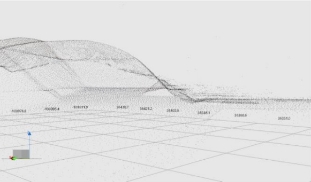
1. 3D測量・点群データ処理
3Dレーザースキャナを使用し、起工測量と出来形測定を対象に3D測量を実施し、点群データを取得しました。
点群処理前
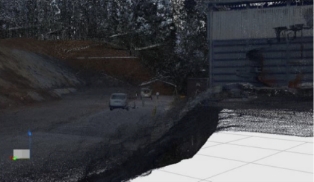
点群処理
-
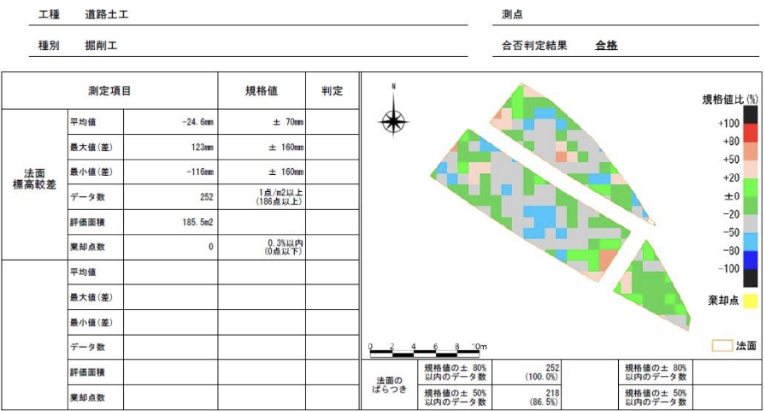
2. 出来形管理帳票の作成
法面施工後に3D出来形測量によって得られた点群データに基づき、出来形管理帳票を作成しました。
土工完成面の基準高をヒートマップに基づく出来形管理表にて評価しています。出来形合否判定総括表
フォトグラメトリによる水中構造物点検手法を試行
高橋秋和建設株式会社と共にサイスガジェット株式会社の協力を得て、今後普及する構造物工に対するICTの活用に対応すべく、構造物の施工管理における点群データの活用を目的に試行を実施しました。
-
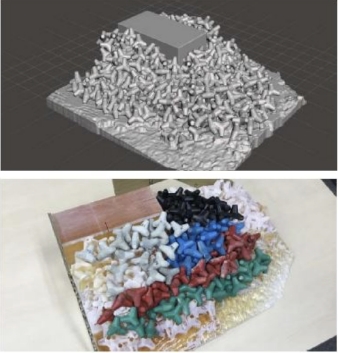
1. 筒形漁礁における試行
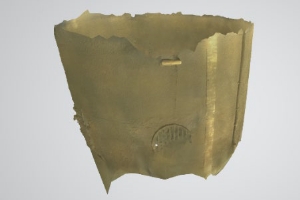
外洋の海底に設置された筒型漁礁をROV(Remotely Operated Vehicle)に搭載したステレオカメラにてさまざまな方向から撮影し、フォトグラメトリ※1の手法を用いて筒型漁礁の詳細で精度の高い3次元点群モデルを生成しました。
生成した3次元点群モデルは筒型漁礁全体を俯瞰できるとともに、写真から取得した外観・質感を再現し、部材の微細な形状寸法および袋詰玉石の網目まで把握できるものとなっています。
※1 「フォトグラメトリ」はさまざまな方向から撮影した対象物の写真データを元に、信頼性のある寸法を解析して3次元モデルを形成するもの。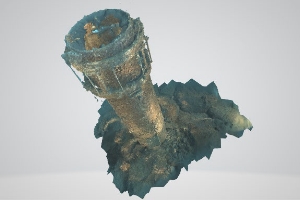
筒形漁礁全体を俯瞰できる3次元点群モデル 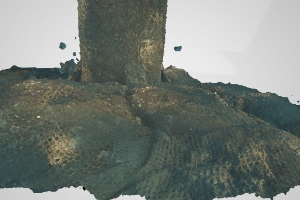
袋詰玉石の形状と網目および口絞り部分を把握
細かい網目まではっきりと再現できている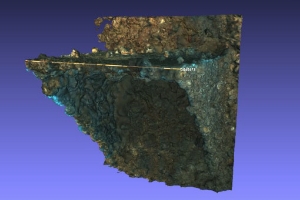
筒形漁礁鋼製部材の詳細形状
高精度に寸法測定可能使用機材

ROV:SRV-8 OCEANBOTICS社製
ステレオカメラ:HYDRO100 IVM社製試行海域へのROV投入状況

施行日:2024年8月
場所:秋田県由利本荘市沖合 -
2. 取水塔における試行
透明度約0.2mの濁水中において、ため池に浮かべたボートによりステレオカメラを取水塔(水深1.7m、塔直径3m)に沿って人力で上下させながら周囲を撮影しました。撮影した写真をもとに、フォトグラメトリの手法を用いて3次元点群モデルを生成し可視化しました。また、本試行ではUAV(Unmanned Aerial Vehicle)を用いて水上部の写真測量を行い、これから作成した3次元点群モデルとフォトグラメトリによる水中部のモデルを統合しました。
生成した3次元点群モデルは、水中部から水上部まで取水口や配管、標尺のメモリといった微細部分を把握できるシームレスなモデルとなっています。取水塔水中部撮影状況(透明度約0.2m)

水中部フォトグラメトリ 俯瞰図
UAV写真測量による3次元点群モデル
場所:秋田県由利本荘市 某ため池 水中部から水上部の
シームレスな3次元点群モデル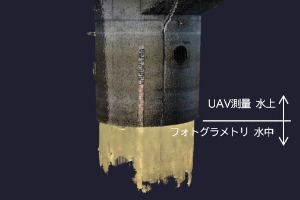
使用機材

ステレオカメラ:HYDRO100 IVM社製
保有ICT技術
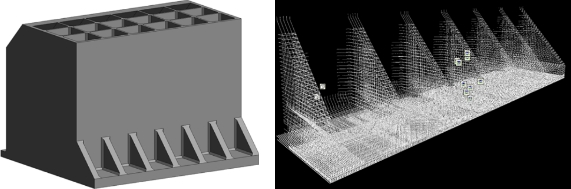
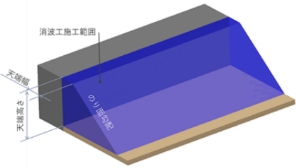
消波工3次元モデリングシステム
「消波工3次元モデリングシステム」は、消波工の測量点群データに個別の消波ブロックの3次元モデルを適用してモデル空間を作成し、この中でブロックの据付シミュレーションを行うシステムです。
このシステムにより、ICT施工の高度化や効率化が可能となり、CIMへの活用も期待できます。
NETIS登録番号 KTK-200003-A
消波工3次元
モデリングシステムの特徴
-
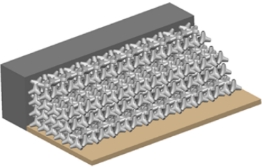
1. 既設消波工を忠実に再現
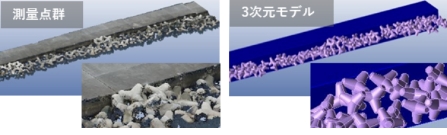
3次元測量点群から、個々の消波ブロックの3次元モデルを自動的に作成することができます。これにより、既設消波工の現況を忠実に再現可能となります。
-
2. 消波ブロック据付検討の効率化
ブロック据付シミュレーションにより、ブロック個々の据付位置を3次元モデルで管理することができるため、施工計画の精度向上や効率化が可能となります。
従来
本システム
-
3. 位置誘導システムとの連携
据付シミュレーションの結果から消波ブロックの位置や姿勢情報を出力することにより、ICT施工への展開が容易となります。これにより従来熟練工に頼っていた据付誘導作業の改善や施工の効率化、出来形の向上が期待できます。
-
4. 施工情報の3D化
消波ブロックの出来形を3次元でモデル化することが可能なため、経年変化の確認など、維持管理に活用することができます。
-
5. 様々な消波ブロックに対応可能
据付シミュレーションはテトラポッドおよびテトラネオの全サイズに対応しています。
また、ブロック形状を読み込む機能を使用して、その他の製品にも対応できます。既設消波工の3次元モデル化
消波ブロックの据付シミュレーション
ICT施工への展開

消波工の出来形再現
(施工情報の3D化)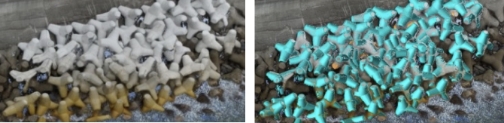
維持管理への活用
(ブロック移動量確認等)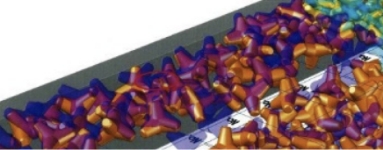
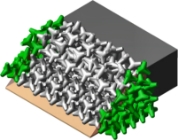
ARブロックナビ
「ARブロックナビ」は、AR(拡張現実)を活用した誘導システムにより、クレーン操作者がブロック等の据付位置や姿勢を確認しながら目標位置に据付できるものです。
このシステムにより、潜水士等の安全性向上や進捗管理等の省人化が図れます。
NETIS登録番号KTK-230002-A
ARブロックナビの特徴
-
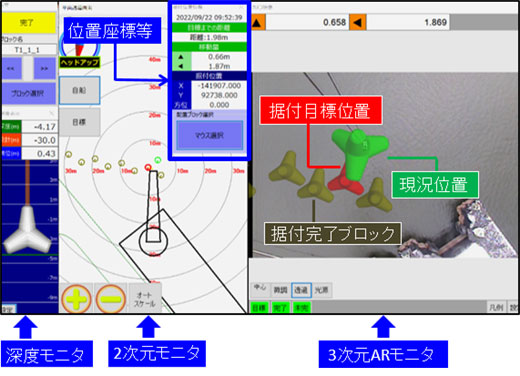
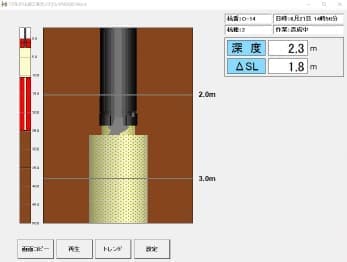
1. 3次元ARモニタ等の誘導表示
クレーンブームトップに設置したカメラからの映像に3次元イメージ化したブロック等の据付位置・姿勢を「3次元ARモニタ」に表示します。また、位置座標等の情報を「2次元モニタ」、クレーンワイヤ繰り出し情報と潮位情報によるブロック据付深度を「深度モニタ」に表示します。
クレーン操作者は、ブロック等の据付位置や姿勢を確認しながら表示された目標位置、深度までブロック等を据え付けることが可能であり、作業員や潜水士がブロック等に接近して目視誘導する必要がなくなるため、安全性が向上します。 -
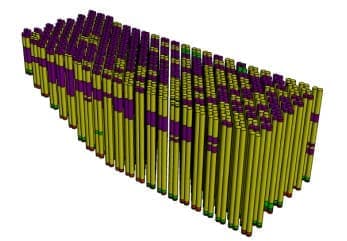
2. 3次元イメージ化による進捗管理
3次元イメージ化によるブロック等の据付進捗管理が可能です。進捗表示は据付日毎の色分けや据付順序を反映した据付再生が可能です。
管理者は据付完了ブロックの据付日毎や全体の進捗状況を3次元イメージによる情報として取得することが可能です。ブロック据付状況図

据付位置・深度、3次元イメージを管理モニタに表示
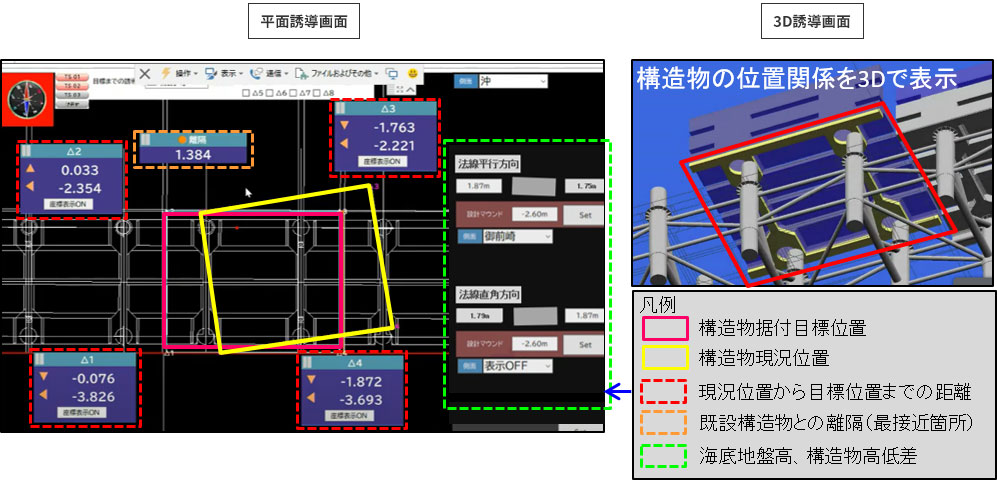
Sea3D-Navi
「Sea3D-Navi」は、据付構造物の2次元での位置誘導機能に加えて3次元イメージ化した構造物の位置関係をリアルタイムに表示可能なシステムです。
このシステムにより、構造物据付時の精度向上や損傷防止が期待できます。
NETIS登録番号KTK-230003-A
Sea3D-Naviの特徴
-
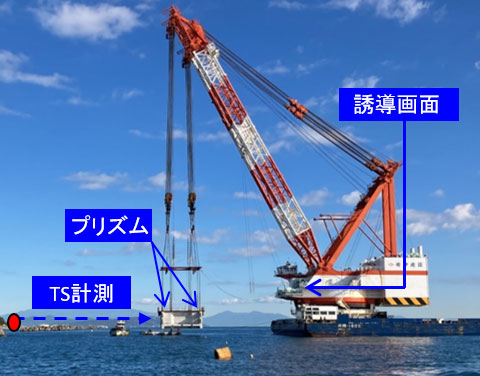
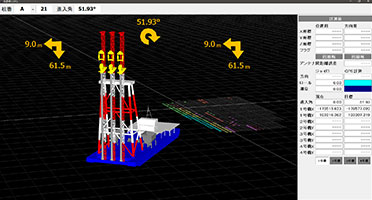
1. 自動追尾トータルステーション(TS)を使用した据付構造物のリアルタイム誘導表示
このシステムは陸上に設置したTSと据付構造物に設置したTS用プリズムによる測定データより、据付構造物の現在位置や姿勢をリアルタイムに誘導画面に表示します。
-
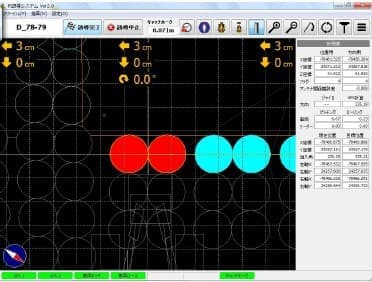
2. 平面誘導と3D誘導を利用した据付管理
「平面誘導画面」には、現況位置(平面、断面)と目標位置の関係を2次元描画と数値で表示します。
「3D誘導画面」には、3次元イメージ化した構造物の位置関係を表示します。3D誘導画面は視点を自由に変更可能なため、水中の不可視部分をあたかも潜水士目線で確認しているような感覚で据付誘導管理が可能です。下図の採用例のようにプレキャストブロックの杭への挿入据付などに有効であり、不可視部分となる水中部等の様子を見える化することで、構造物の接触による損傷を防止できます。構造物据付状況図
平面誘導画面に構造物の目標位置や離隔を表示し、3D誘導画面に構造物3Dイメージを表示する
不動テトラの地盤改良は
ICTとの融合により
さらに進化をつづけています。
国土交通省は、ICTの全面的な活用によって建設システム全体の生産性向上を図り、もって魅力ある建設現場を目指す施策「i-Construction」(アイ・コンストラクション)を進めています。不動テトラもその理念に基づき、地盤改良とICTを融合させた「ICT地盤改良」技術の開発に取り組んでおり、生産性・安全性・品質の向上、見える化、技術伝承を進めることで建設現場の生産性革命を達成していきます。
マシン制御
マシンガイダンス・見える化
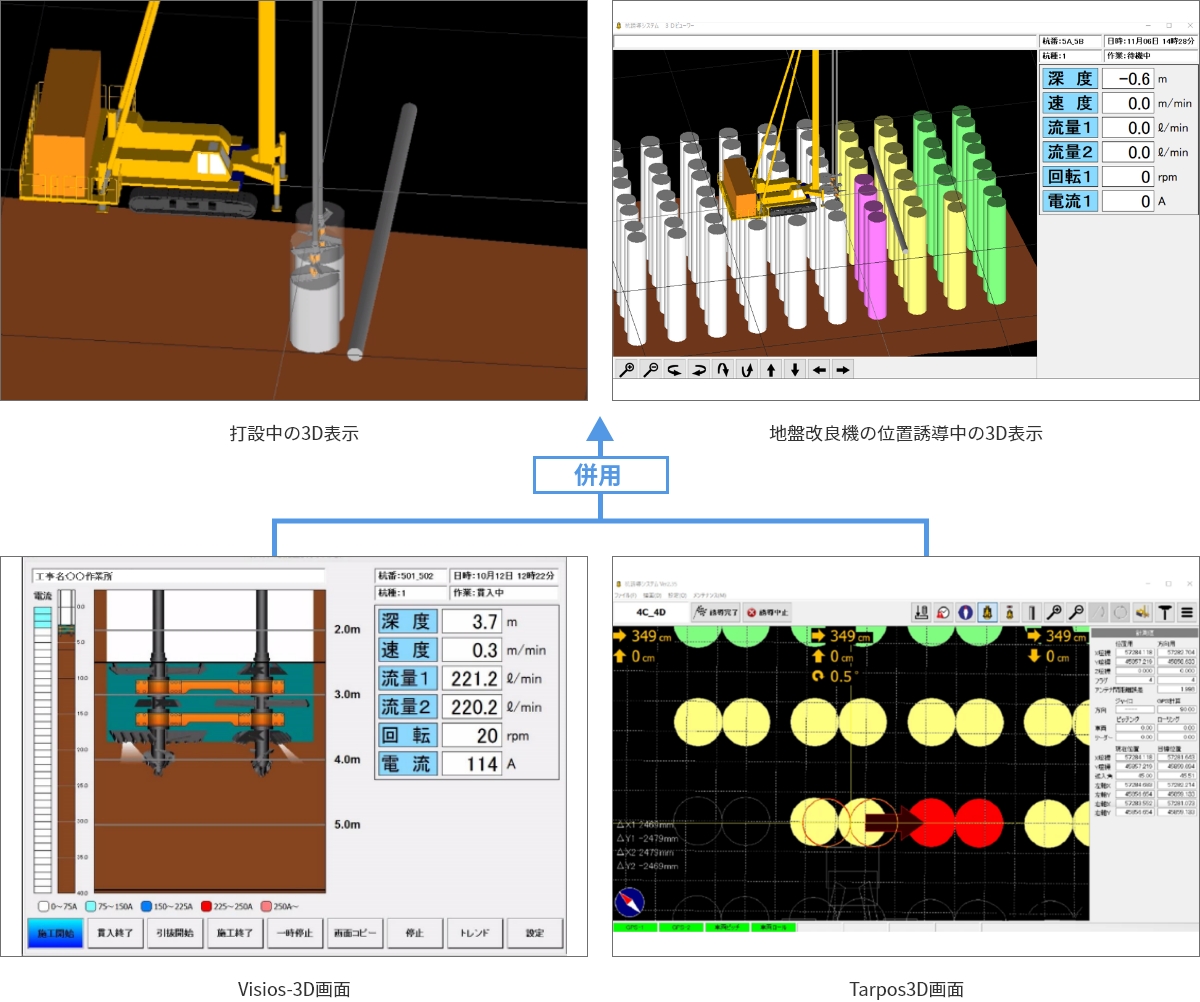
- リアルタイム施工管理システム+3次元モデル化システム「Visios-3D」
- GNSS位置誘導システム「Tarpos3D」
- リアルタイム3D表示「Visios-3D+Tarpos3D」
- 補助重機のARシステム「Visios-AR」
- 作業船位置・船舶回航情報システム
BIM/CIM
※1. GeoPilot、GeoPilot-AutoPile、Visios、Visios-3D、FUTEOS-CIM、CONOS、ToolPileXは不動テトラの登録商標です。※2. GeoPilotは自動化技術のシリーズ名、Visiosは現場の見える化技術のシリーズ名です。
マシン制御
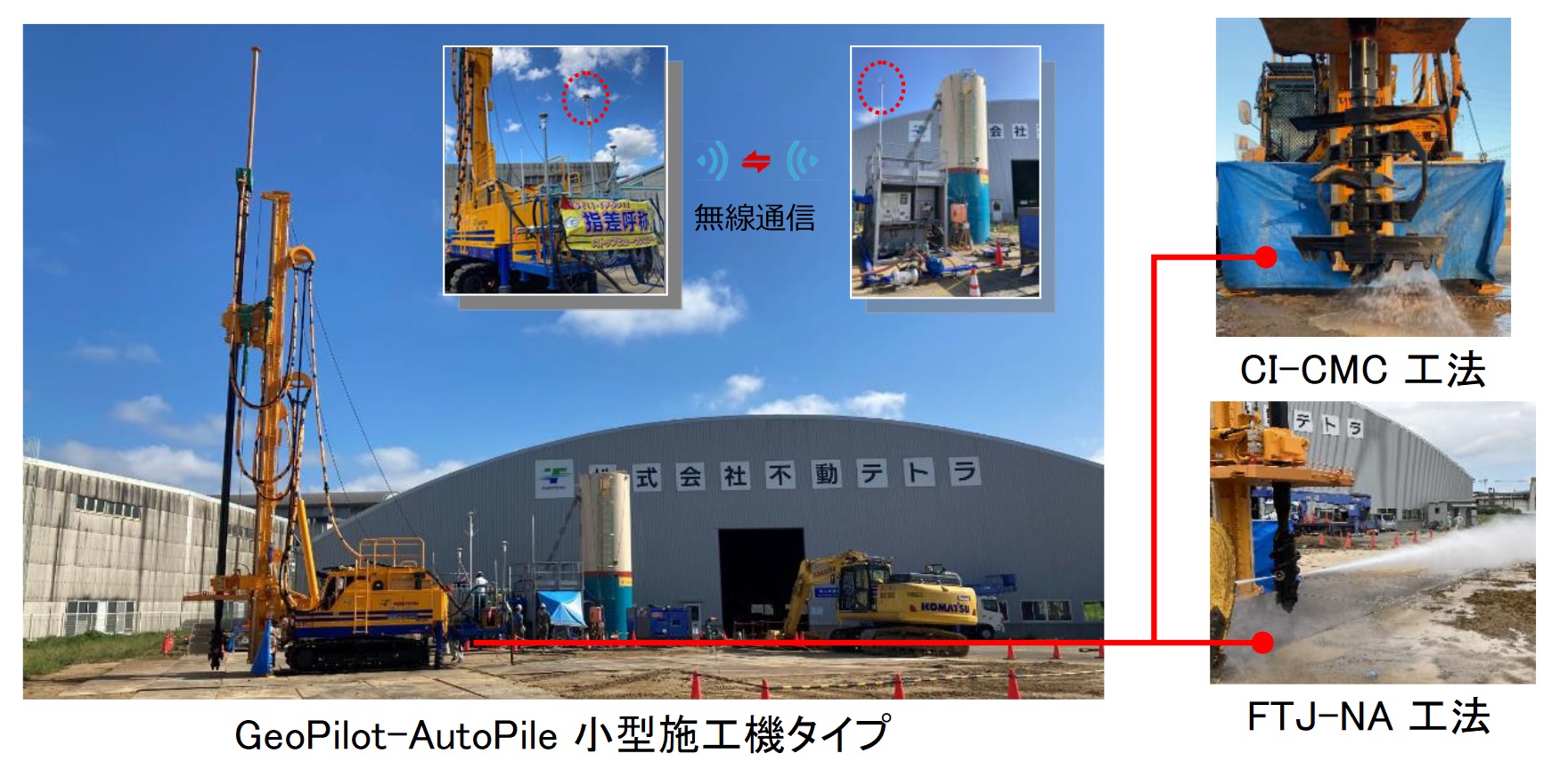
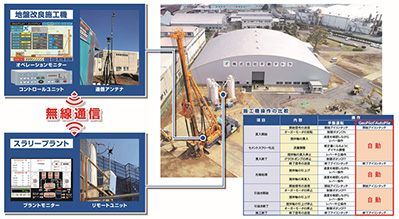
自動打設システム「GeoPilot-AutoPile」
NETIS : QS-240034-A
大型地盤改良機で初めてとなる自動打設システム「GeoPilot-AutoPile」(ジオパイロット・オートパイル)を開発・実用化しました。対応したのはCI-CMC工法であり、撹拌翼の貫入・引抜速度、セメントスラリーの吐出量などが適切な値になるように、コントロールユニットが施工機を制御します。対応工法は順次拡大する予定です。
GeoPilot-AutoPileの特徴
-
1. 操作の簡素化
施工中に管理計器を監視しながらオペレータが行っていた操作が、自動制御に置き換わり、作業負担が軽減するとともに、手戻り作業が無くなることで施工サイクルが効率化し、生産性の向上が見込めます。
-
2. 習熟期間の短縮
従来、施工ができるまでに3年程度かかっていたオペレータの習熟期間を約3分の1に短縮でき、若年オペレータや海外現地オペレータの活躍が期待できます。
-
3. 確実な品質の提供
施工誤差やオペレータの熟練度による品質の差異が少なくなります。
-
4. 安全性の向上
各種センサーのデジタル情報により、施工機の状態を監視し続け、オペレータの注意喚起を図ることや、適切な制御を行うため安全性が向上します。


パンフレット
動画
遠隔操縦システム
不動テトラの総合技術研究所試験フィールド(茨城県土浦市)で、地盤改良の施工機において初となる、遠隔操縦による地盤改良現場の無人化実証実験を行いました。
今回の実証実験では、当社の地盤改良施工機に遠隔操縦システム(KanaTouch(カナタッチ)※1)を組み込み、地盤改良施工機の走行、旋回、改良杭の打設を遠隔操縦で行えることを確認しました。また、当社のICTシステムであるGNSS位置誘導システム「Tarpos(ターポス)3D」や自動打設システムの運用を確認しました。今後は、地盤改良施工機の遠隔操縦に関して、関係各所と協力して無人化現場での安全ルールを確立し、実際の現場への導入を目指していく予定です。
※1 「KanaTouch」は(株)カナモトの保有する建設機械遠隔操縦システムの商品名(商標登録中)です。

ニュースリリース
マシンガイダンス・見える化
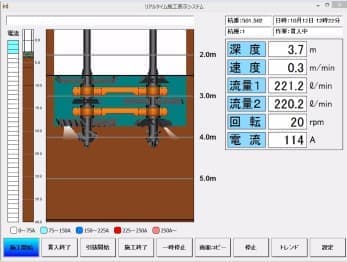
リアルタイム施工管理+3次元モデル化システム Visios-3D
NETIS : KK-190005-VE
施工機から離れた場所でも、施工機の運転状況を見られる施工管理システムです。タブレットPCの画面で、複数のスタッフが同時に情報を共有できます。
施工記録を3次元モデルに変換して、視覚的に施工状況を把握することができます。

パンフレット
動画
GNSS地盤改良機誘導システム Tarpos 3D
NETIS : KTK-200015-VE
GNSSを利用して地盤改良機を2D・3D表示し、地盤改良機を打設位置まで誘導するシステムです。オペレータは地盤改良機を誘導員なしで誘導することができます。施工現場の省力化が図られるとともに、誘導員が施工機に近づくことが無くなるので安全性も向上します。誘導したデータは、ICT地盤改良工(施工履歴データを用いた出来形管理要領)に適用することが出来ます。
※本システムは不動テトラと西尾レントオールの共同開発です。

リアルタイム3D表示 Visios-3D+Tarpos 3D
「Visios-3D」のリアルタイム施工管理システムに、「Tarpos 3D」の施工機位置誘導システムを併用することで、リアルタイムな施工状況を3D表示することができます。地盤改良工事の進捗状況や施工状況を容易に把握することができます。支持層・地中埋設物・接近構造物を3D表示することができ、より安全性と視認性が向上した地盤改良をすることが可能になります。
補助重機のARシステム Visios-AR
補助作業を行うバックホウやタイヤショベルに取り付ける、AR(拡張現実)システムです。カメラで取り込んだ画像に、足場鉄板の設置位置や埋設物などの情報を重ねて、リアルタイムに映し出します。GNSSの活用により地表面に目印が不要となった現場でも、補助作業ができます。


パンフレット
作業船位置・船舶回航情報システム
全国に展開する海上作業船の現在の位置と、回航航路を記録・表示するシステムです。インターネットを介して、PC、スマートフォンのブラウザ画面で、いつでも船舶の位置を確認できます。
※本システムは全日本漁港建設協会が提供しているサービスです。


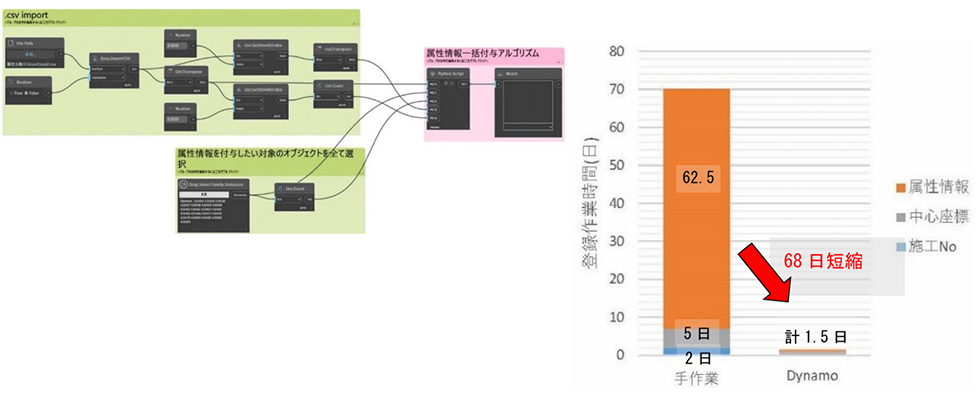
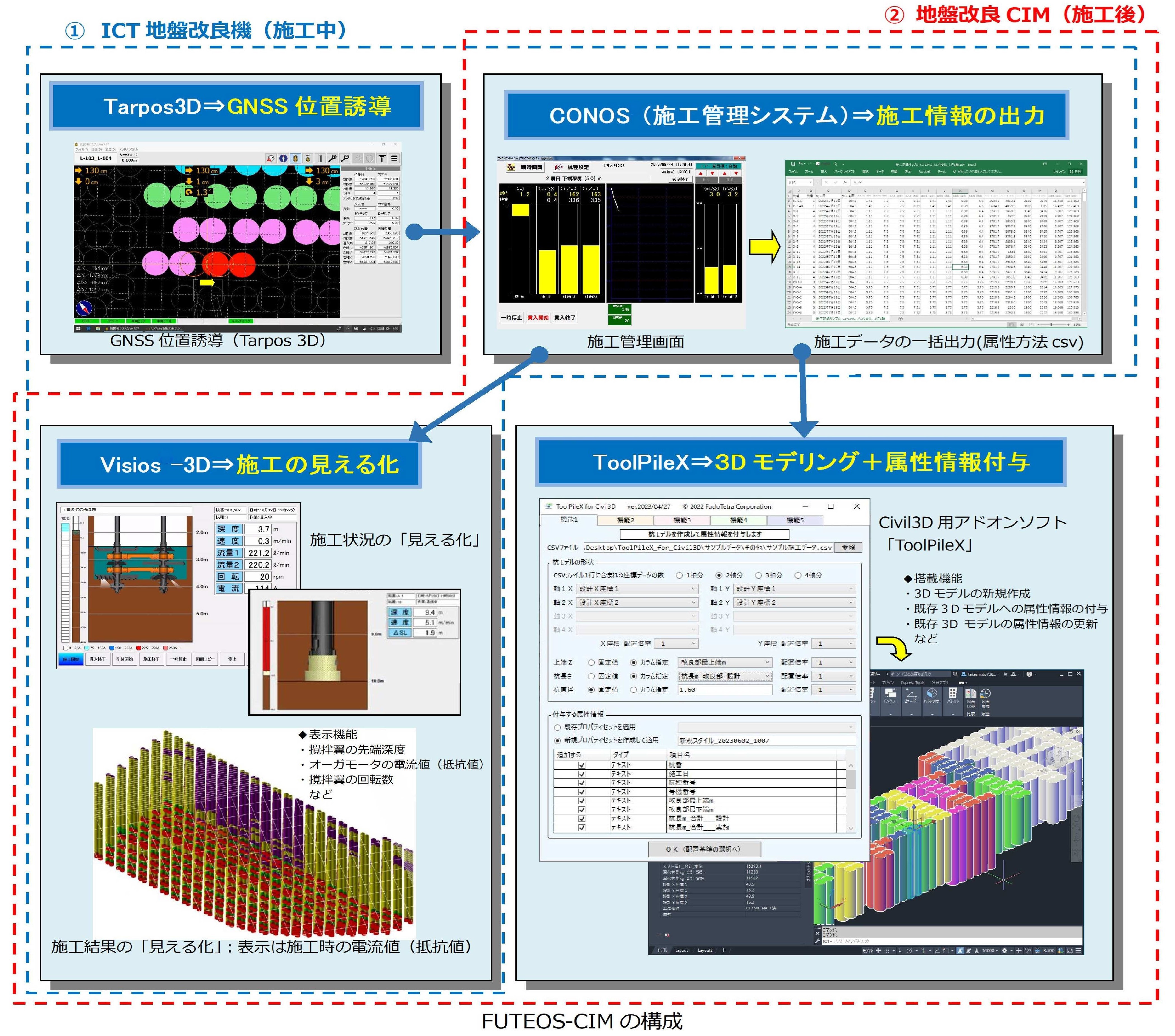
BIM/CIM業務のパッケージ FUTEOS-CIM
地盤改良のICT施工からBIM/CIM成果物の作成までを一貫して行うことができるシステムのパッケージです。従来のICT地盤改良システム※1の連携機能の強化によって、各システムから出力される施工データ(属性情報)を自動で統合し、CIMモデル(属性情報の付与された3Dモデル)の瞬時作成をできるようにしました。
※1 従来のICT地盤改良システムは、下記になります。
・GNSS位置誘導システム「Tarpos(ターポス)3D」
・施工管理システム「CONOS(コノス)」
・リアルタイム施工管理システム「Visios(ビジオス)-3D」
パンフレット
3次元点群データを用いた
消波ブロック維持管理の
効率化技術
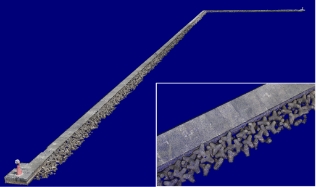
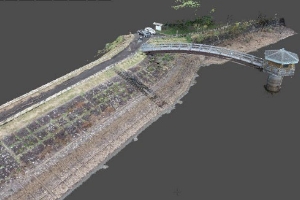
近年、さまざまな分野で活用が進んでいるUAV(ドローン)は、港湾施設の維持管理作業の一つである点検診断へも適用されつつあります。
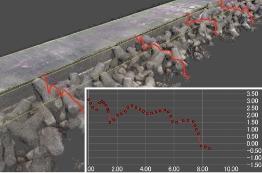
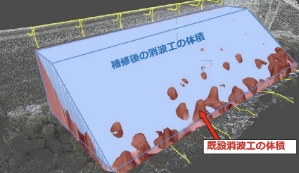
不動テトラでは、UAVの写真データから3次元点群データを作成し,これを用いて消波ブロックの維持管理を効率的に行う手法の検討を進めています。その一環として、複数の防波堤施設において消波ブロックをUAVにて測量し、国土交通省「港湾の施設の点検診断ガイドライン」に沿った消波ブロックの点検診断(性能低下度の評価)を実施しています。また、消波工の維持補修時に必要となる嵩上げブロック数量を高精度で算出するための手法も研究しております。
これらの技術の確立によって、ブロック環境事業の生産性向上に寄与します。